
地址:中国 · 沈阳市苏家屯区梧桐大街2号 联系电话:024-89597888 024-89597555 社交媒体:





辽ICP备17002622号-1 辽ICP备17002622号-3 辽公网安备 21011102000115号
辽ICP备17002622号-1 辽ICP备17002622号-3 辽公网安备 21011102000115号

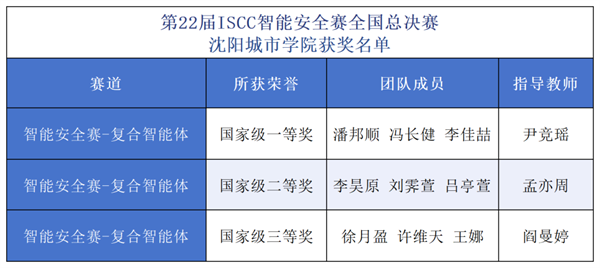
在刚刚落幕的2025年第22届ISCC智能安全赛全国总决赛中,沈阳城市学院机器人工程中心派出的三支多模态机器人团队在“智能安全赛-复合智能体”赛道中,分别斩获国赛一等奖、二等奖、三等奖,实现了“全等级奖项”的突破,创下参赛最好成绩。
ISCC智能安全赛作为全国智能安全领域极具权威性与影响力的高水平赛事,由中国兵工学会、北京理工大学、教育部信息对抗技术专业虚拟教研室联合主办,中国兵工学会信息安全与对抗专业委员会等承办,自2004年创办以来,已成为国内智能安全与机器人领域规模最大、覆盖最广的综合性赛事之一。本届大赛紧扣“信息安全与智能技术深度融合”主题,设6大核心赛道、18个细分赛项,涵盖空地协同、工业互联网、自动驾驶等全场景。与往届相比,本届赛事全国313所院校参赛,国赛队伍规模增长25%,实现覆盖范围与团队数量“双突破”。

沈阳城市学院本次参赛的多模态机器人,是一种能通过多种传感器和智能算法,感知复杂环境、融合信息并自主决策的先进系统。其核心特点是能够处理多步骤、跨场景的综合任务,实现从感知到执行的完整闭环。
该机器人支持手机APP、手柄、PC远程等多种控制方式,可完成底盘移动、机械臂精细操作等动作。它具备自主导航、视觉识别(如目标检测、颜色追踪)等功能。

两个月的备赛过程中,团队面临的最大挑战是复合智能体协同控制问题。因为在比赛中,机器人需要通过语音指令“小迈小迈”进行唤醒,随后准确识别“开始安全任务”指令并执行比赛流程。这些流程需要视觉识别、平台对齐、物品夹取、路径导航等多个技术环节的精准配合。想要机器人完成这些指令,就需要上位机(大脑)、下位机(小脑)和传感器(眼睛耳朵)之间的信息同步与动作协调。
为解决这一难题,团队创新性地提出了三层解决方案:在硬件通信层面,采用自定义的“RRC”串口通信协议,确保电机控制指令、里程计数据等信息的实时交互;在软件协调层面,依托ROS系统搭建中央协调框架,实现各传感器数据的统一管理和调度;在控制逻辑优化层面,下位机基于FreeRTOS操作系统,采用任务优先级调度机制,确保各项任务的高效协同执行。

在系统调试的过程中,师生们发现,当赛场阳光强时,深度相机拍出来的画面一片白,机器人便会分不清哪里是夹取平台。为了应对比赛现场的复杂环境挑战,团队也开发了多套应对策略。2023级智能科学与技术专业潘邦顺同学说:“考虑到现场可能存在的强光干扰视觉识别,在尹竞瑶、刘盛玉等老师的指导下,我们反复打磨技术方案,从硬件调试到程序优化,从模拟演练到解决复合智能体协同控制的核心难题,每一次修改都凝聚着团队的汗水。”
能够在两个月的备赛时间内,完成了从技术方案设计及优化到程序开发及调试再到模拟实战演练的全流程攻坚,正是基于丰富的前期研究基础与技术沉淀。此次出征的多模态机器人团队,依托学校机器人工程中心的优质教学资源与科研平台,面对赛事中复合智能体协同控制、复杂场景等核心难题,团队成员昼夜攻关,充分发挥多模态技术优势,将机器人“感知-识别-执行”全链路能力深度融合。
李昊原同学说:“备赛的两个月里,我们曾因复杂场景下的技术瓶颈陷入困境,也曾在深夜的实验室反复调试程序到疲惫不堪,但是孟亦周、刘盛玉等老师一直鼓励我们,手把手指导我们优化智能控制逻辑的场景,最终打造出兼具稳定性与创新性的参赛作品。”
徐月盈同学说:“备赛全程,在一次次攻克复合智能体协同控制难题的过程中,我们也真正读懂了团队协作的意义,每一次突破都离不开彼此的支撑。这次比赛,我们不仅收获了荣誉,更收获了宝贵的实战思维,让我们在未来能走得更远。”
智能科学与技术专业副主任尹竞瑶表示:“学校搭建的多模态机器人实验室,为师生们提供了从技术研发到实战测试的全流程平台和硬件支撑,让大家能把创意落地、把方案做实。从备赛指导到资源协调,学院始终全力护航,不仅鼓励同学们‘以赛练技’,更推动‘以赛促学、以赛促教’ 落地。备赛期间,多模态机器人团队老师和学生们在实验室调试的日日夜夜和付出的辛苦仍历历在目,感谢为之付出的大家,未来希望我们再创辉煌!”